
リニアステッピングモータが高速モーション制御を実現する際の主な仕組みや特性は次の通りです:
1. ステップ角の小ささ:
- リニアステッピングモータは、一歩進むために必要なステップ角が小さく設計されています。これにより、微細な動きや高速な動作が可能となります。
2. ステップ周波数の調整:
- リニアステッピングモータでは、制御信号の周波数を調整することで、高速なモーション制御を実現します。高いステップ周波数で駆動することで、モーターの動作速度を向上させることができます。
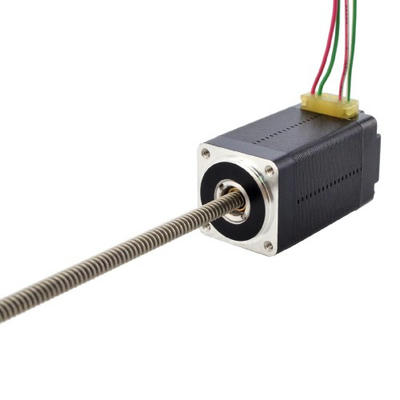
「写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504AC5-150RS 0.02Nm ねじリード 2mm(0.07874") 長さ150mm」
「写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504AC5-150RS 0.02Nm ねじリード 2mm(0.07874") 長さ150mm」
3. 電流制御:
- 適切な電流制御を行うことで、リニアステッピングモータのトルク特性を最適化し、高速な動作時にも安定したパフォーマンスを発揮します。
4. 高分解能のエンコーダー:
- 高速なモーション制御を実現するためには、高分解能のエンコーダーを使用して位置検出を行います。これにより、モーターの位置を正確に検出し、高速な動作時でも安定した位置制御が可能となります。

5. 加速度制御:
- リニアステッピングモータは、加速度制御を適用することで、素早く安定した加速や減速を実現します。これにより、高速なモーション制御をより効果的に行うことができます。
6. 適切なドライバーの選択:
- 高速なモーション制御を実現するためには、適切なドライバーを選択することが重要です。高性能で信頼性の高いドライバーを使用することで、高速な動作時でも安定した制御を実現することができます。
これらの要素を組み合わせて、リニアステッピングモータは高速なモーション制御を実現し、精密な位置決めや高速な動作を実現することができます。
PR
プロフィール
HN:
No Name Ninja
性別:
非公開
最新記事
(07/30)
(07/24)
(07/18)
(07/11)
(07/05)