
中空ステッピングモータの軸封不良による水漏れや油漏れが発生する場合、以下に挙げるような様々な原因が考えられます:
1. 軸封の損傷:
- 軸封自体が損傷している場合、水や油が外部に漏れる可能性があります。損傷は使用中の振動や摩擦、過剰な圧力などが原因となることがあります。
2. 軸封の劣化:
- 軸封が経年劣化している場合、シール性能が低下し、水や油の漏れが発生する可能性があります。劣化は熱、化学物質、摩擦などによって引き起こされることがあります。
3. 不適切な取り付け:
- 軸封が不適切に取り付けられていると、シールが適切に機能せず、漏れが発生する可能性があります。適切な取り付け手順や圧入などが行われているかどうかを確認する必要があります。
4. 環境条件:
- 水漏れや油漏れの原因として、使用環境の影響も考えられます。例えば、高温や高湿度の環境、化学物質の影響などが軸封の劣化や損傷を引き起こす可能性があります。
5. 過剰な負荷や振動:
- モーターに過剰な負荷がかかったり、振動が発生したりすると、軸封に負担がかかり、損傷や漏れが発生する可能性があります。
6. メンテナンス不良:
- 適切な定期メンテナンスが行われていない場合、軸封の状態が確認されず、漏れが放置される可能性があります。
これらの要因を考慮して、軸封不良による水漏れや油漏れの原因を特定し、修理や交換を行うことが重要です。また、定期的なメンテナンスや適切な使用環境の確保も重要なポイントとなります。
PR
リニアステッピングモータが高速モーション制御を実現する際の主な仕組みや特性は次の通りです:
1. ステップ角の小ささ:
- リニアステッピングモータは、一歩進むために必要なステップ角が小さく設計されています。これにより、微細な動きや高速な動作が可能となります。
2. ステップ周波数の調整:
- リニアステッピングモータでは、制御信号の周波数を調整することで、高速なモーション制御を実現します。高いステップ周波数で駆動することで、モーターの動作速度を向上させることができます。
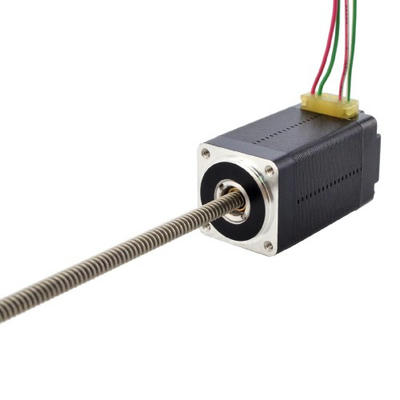
「写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504AC5-150RS 0.02Nm ねじリード 2mm(0.07874") 長さ150mm」
「写真の由来:NEMA 8 ノンキャプティブリニアステッピングモータ 8N15S0504AC5-150RS 0.02Nm ねじリード 2mm(0.07874") 長さ150mm」
3. 電流制御:
- 適切な電流制御を行うことで、リニアステッピングモータのトルク特性を最適化し、高速な動作時にも安定したパフォーマンスを発揮します。
4. 高分解能のエンコーダー:
- 高速なモーション制御を実現するためには、高分解能のエンコーダーを使用して位置検出を行います。これにより、モーターの位置を正確に検出し、高速な動作時でも安定した位置制御が可能となります。

5. 加速度制御:
- リニアステッピングモータは、加速度制御を適用することで、素早く安定した加速や減速を実現します。これにより、高速なモーション制御をより効果的に行うことができます。
6. 適切なドライバーの選択:
- 高速なモーション制御を実現するためには、適切なドライバーを選択することが重要です。高性能で信頼性の高いドライバーを使用することで、高速な動作時でも安定した制御を実現することができます。
これらの要素を組み合わせて、リニアステッピングモータは高速なモーション制御を実現し、精密な位置決めや高速な動作を実現することができます。
モータドライバの制御信号には、一般的に以下のようなものがあります:
1. PWM信号:
- パルス幅変調(PWM)信号は、モータドライバにモータの回転速度を制御するための信号を提供します。デューティサイクルの変化によってモータの速度やトルクを調整します。
2. 方向制御信号:
- 方向制御信号は、モータが回転する方向を決定するための信号です。通常、デジタル信号(HighまたはLow)でモータの回転方向を指定します。
3. ブレーキ信号:
- ブレーキ信号は、モータを急停止させるための信号です。この信号がアクティブになると、モータは急停止します。
4. エンコーダーフィードバック信号:
- エンコーダーフィードバック信号は、モータの回転位置や速度をモニタリングするための信号です。この情報は、モータの正確な位置制御や速度制御に使用されます。
5. フォールト検出信号:
- フォールト検出信号は、モータやドライバの異常を検出して保護するための信号です。過電流や過熱などの状況でフォールト信号がアクティブになり、安全を確保します。
6. リセット信号:
- リセット信号は、モータドライバをリセットして初期状態に戻すための信号です。異常が発生した場合やシステム全体を再起動する必要がある場合に使用されます。
これらの一般的な制御信号を適切に使用することで、モータの正確な制御や安全な運転を実現することができます。モータドライバの仕様書やマニュアルには、それぞれの信号の詳細な説明や使用方法が記載されているので、必要に応じて参照してください。
モータドライバは、モータを制御するための電子回路であり、モータの速度、方向、トルクなどを制御する役割を果たします。モータドライバにはさまざまな種類があり、主なものを以下に示します:
1. Hブリッジモータドライバ:
- Hブリッジは、モータを制御するための一般的な回路形態です。Hブリッジモータドライバは、モータの回転方向を制御するために使用されます。このタイプのモータドライバは、直流モータやブラシレスDCモータを制御するのに適しています。

「写真の由来:Nema 17, 23, 24 ステッピングモータ用デジタルステッピングドライバ 1.0-4.2A 20-50VDC」
「写真の由来:Nema 17, 23, 24 ステッピングモータ用デジタルステッピングドライバ 1.0-4.2A 20-50VDC」
2. PWMモータドライバ:
- PWM(パルス幅変調)モータドライバは、パルス幅の変化を使用してモータの速度を制御するためのドライバです。PWM信号は、モータに供給される電力の平均値を変化させることで、効率的にモータを制御します。
3. ステッピングモータドライバ:
- ステッピングモータドライバは、ステッピングモータを制御するための専用のドライバです。ステッピングモータは、一定の角度だけ回転するため、正確な位置制御が可能です。ステッピングモータドライバは、ステッピングモータのステップ数や回転速度を制御します。

「写真の由来:Leadshine デジタルステッピングドライバ DM556 20-50VDC 0.5-5.6A (Nema 17、23、24ステップモーターに適合)」
「写真の由来:Leadshine デジタルステッピングドライバ DM556 20-50VDC 0.5-5.6A (Nema 17、23、24ステップモーターに適合)」
4. ブラシレスモータドライバ:
- ブラシレスモータドライバは、ブラシレスDCモータを制御するための特殊なドライバです。ブラシレスモータは、内部のセンサーや特殊なコントロールを必要とするため、専用のドライバが使用されます。
5. インテリジェントモータドライバ:
- インテリジェントモータドライバには、モーションコントロールや位置制御などの高度な機能が統合されています。これらのドライバは、複雑なモータ制御アプリケーションに適しています。
これらは一般的なモータドライバの種類ですが、市場ではさらに多くの種類や特殊用途に特化したモータドライバも存在します。適切なモータドライバを選択することで、モータの性能を最大限に引き出し、効率的かつ正確な制御を実現できます。
ブラシレスDCモータの速度低下や過熱が発生した場合、以下に示すいくつかの一般的な原因が考えられます:
1. 過負荷:
- モーターが設計された容量を超える負荷にさらされている場合、過負荷が発生し、速度低下や過熱の原因となります。
2. 温度上昇:
- モーター周囲の十分な空気循環が確保されていない場合、モーターの温度が上昇し、過熱が発生する可能性があります。
3. 電源供給の問題:
- 電源の不安定性や電圧の低下がモーターの正常な動作を妨げ、速度低下や過熱を引き起こす可能性があります。
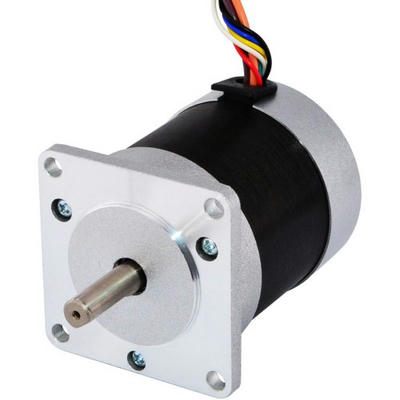
「写真の由来:36V 4300RPM 0.22Nm 99W 4.2A Ф57x69mm ブラシレスDCモータ(BLDC)」
「写真の由来:36V 4300RPM 0.22Nm 99W 4.2A Ф57x69mm ブラシレスDCモータ(BLDC)」
4. フェーズの問題:
- BLDCモーターの内部でフェーズの接触不良や断線が発生した場合、正常な動作が妨げられ、速度低下や過熱が生じる可能性があります。
5. 制御回路の問題:
- モーターを制御する回路やドライバーに問題がある場合、適切な電流や電圧が供給されず、速度低下や過熱が発生する可能性があります。
6. 磁気センサーの問題:
- BLDCモーターの磁気センサーに問題がある場合、適切な位置検出ができず、正確な制御ができなくなり、速度低下や過熱が引き起こされる可能性があります。
7. 磁石の劣化:
- モーター内の永久磁石が劣化している場合、トルクが低下し、速度低下や過熱が生じる可能性があります。
これらは一般的な原因であり、速度低下や過熱が発生した場合に考慮すべき点です。問題の特定と解決には、専門家の助言や適切な診断が必要となります。
プロフィール
HN:
No Name Ninja
性別:
非公開
最新記事
(08/05)
(07/30)
(07/24)
(07/18)
(07/11)